ロボットの組立てと動作テスト
Updated on: 2018-06-16
ロボットの組立てと動作テスト
教材のロボットハードウェアを組み立て、簡単な動作テストを行います。
モータドライバのバスパワー化
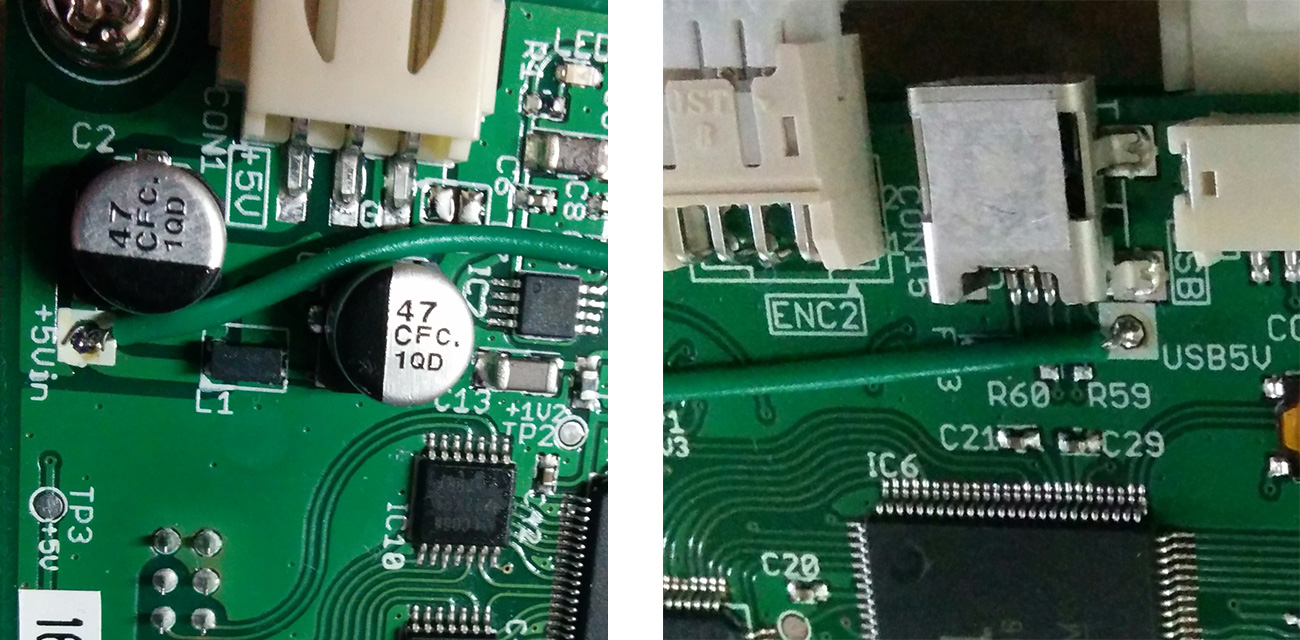
本セミナーの教材として使用するモータドライバは、初期状態ではセルフパワー(USBケーブルの他に、別途電源を供給する必要のある)USBデバイスとして動作します。本セミナーでは、簡易的な使用のため、モータドライバに配線を追加してバスパワーUSBデバイスとして使用します。
-
被覆電線を約80mmの長さで切断
-
ワイヤストリッパを用い、電線の両端5mmの被覆を剥く
-
モータドライバ上の「+5Vin」と「USB5V」の穴に電線を差し込み、半田付け
-
半田付けがうまく行えているか確認 (オーガナイザーまたはTAに声をかけてください)
注意:「CON1」から5Vを供給して利用する場合には、ここで半田付けした電線を切除してください。そのままで「CON1」から5Vを供給すると、モータドライバおよびUSBで接続しているPCが破損する可能性があります。
ロボットの組立て
-
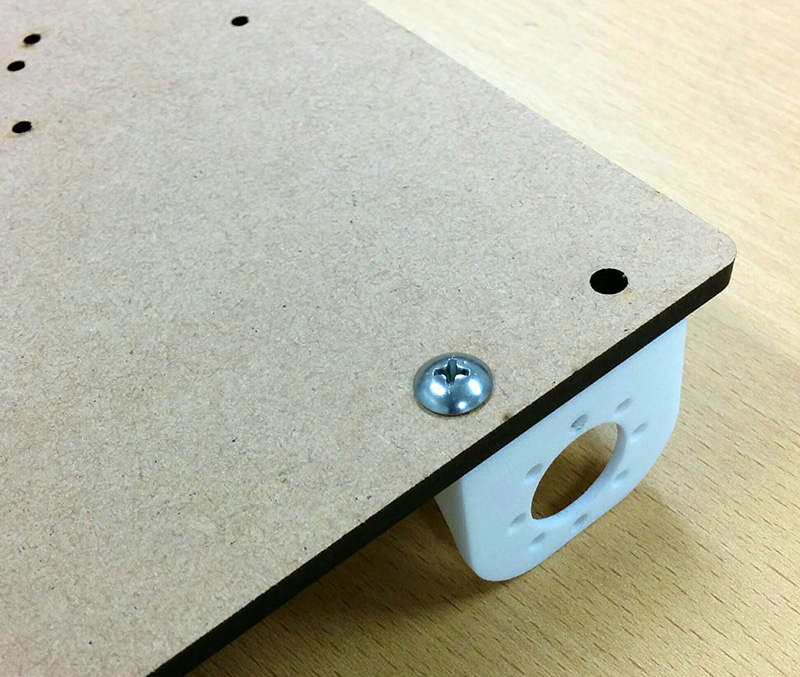
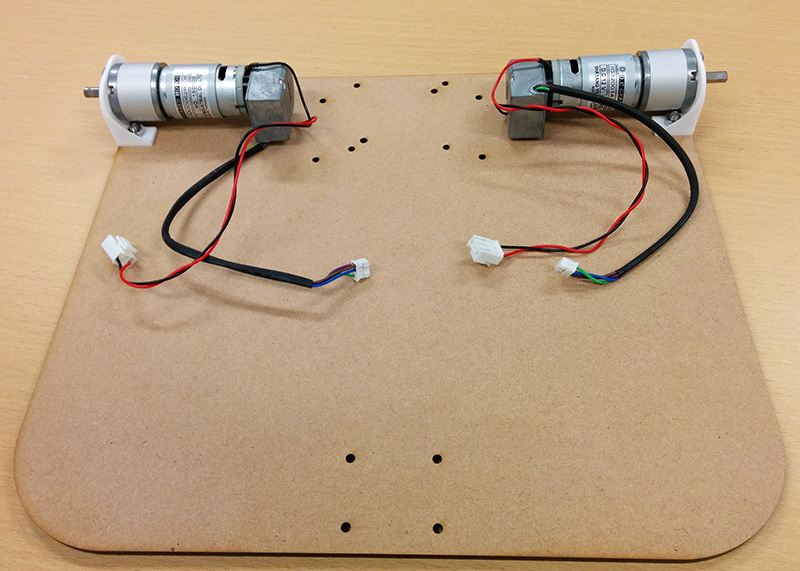
天板にモータマウントをネジ止め
表からM5のネジを軽く留める

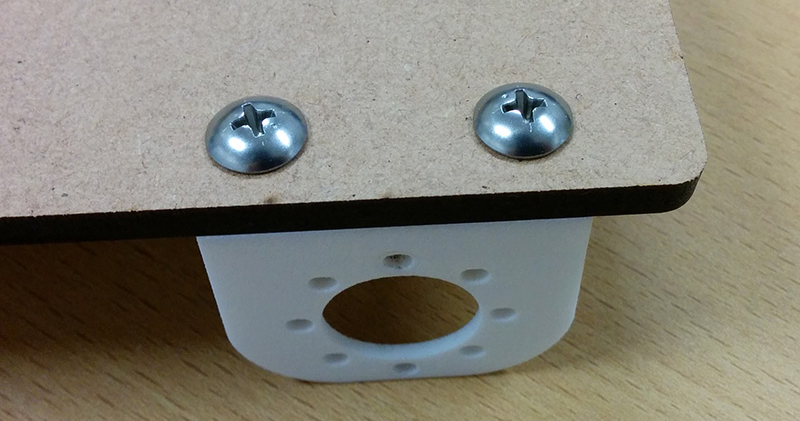
同様にもう一本もネジ留め
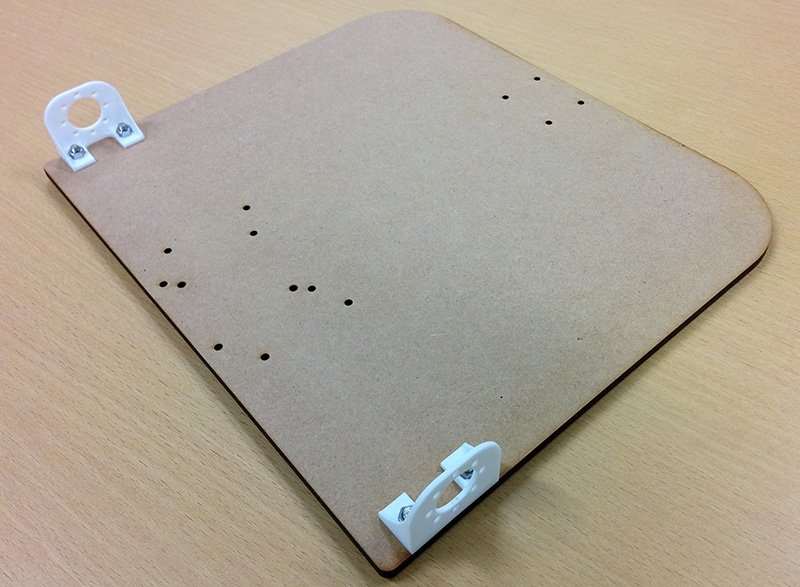
反対側のモータマウントも同様に取り付け
モータマウント裏側の溝に、M5のナットをはめ込み
-
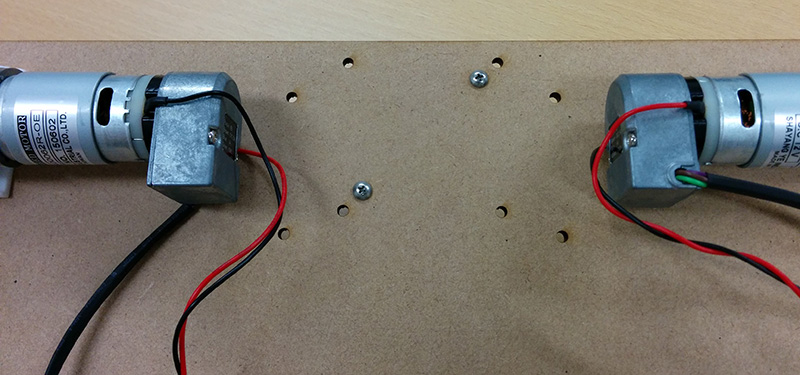
モータマウントにモータをネジ止め
モータをモータマウントにはめ込み

モータマウント側面の穴から、M3のネジ (写真ではプラスネジですが、キットでは六角穴付きネジになります) 4本でモータを固定

反対側のモータも同様に取り付け
-
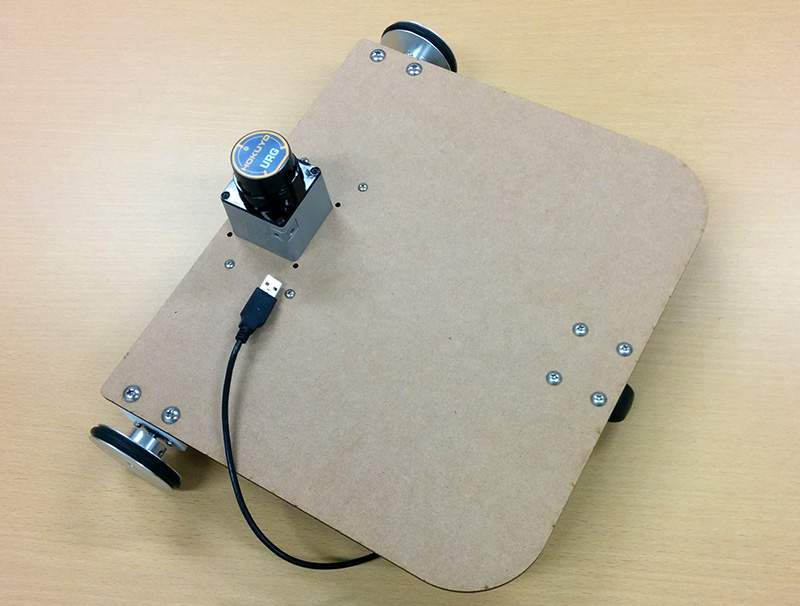
天板に測域センサをネジ止め
天板の表側に、写真の向きにURGを載せる

裏面からM3のネジ2本で固定
-
天板にキャスターをネジ止め
天板の表側からM4のネジを挿入し
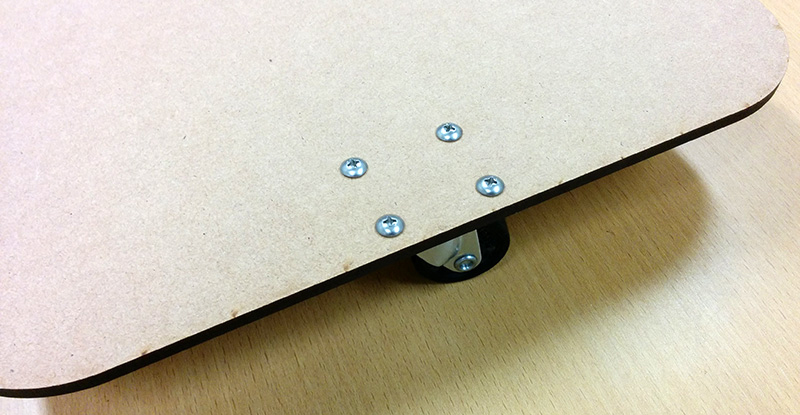
裏面からM4のナットで固定

-
モータにホイールをイモネジ止め
モータ軸のDカット(平らな面)に、ホイールのイモネジが入っているねじ穴を合わせ、六角レンチでイモネジを締めて固定

-
天板にモータドライバをネジ止め
天板の裏面に、写真の向きでモータドライバを載せ
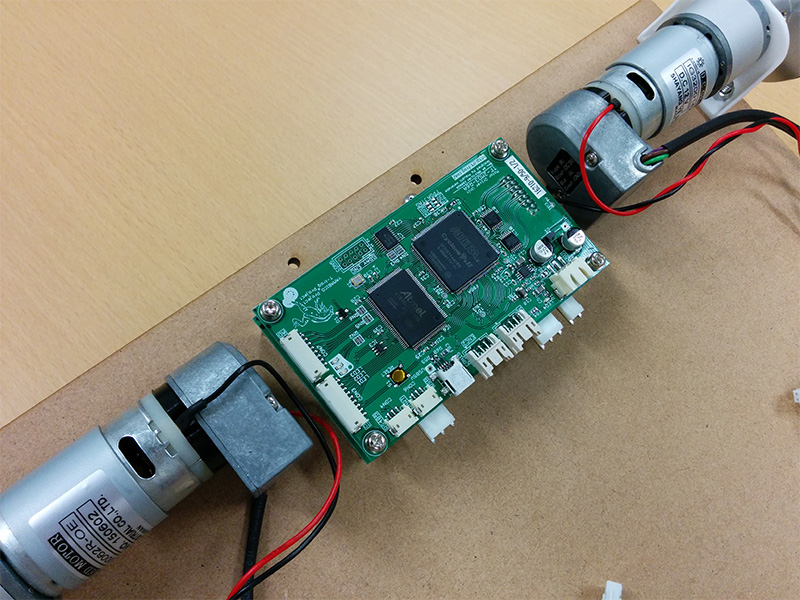
表面からM3のネジで固定

-
天板に電池ボックスを貼り付け
天板の裏面に、写真の向きで、両面テープを用いて電池ボックスを固定
貼り合わせ後、よく押しつけて、接着面同士を十分に密着させます。接着力を発揮させるため、貼り付け後5分間は、電池ボックスが上側にある状態を維持して下さい。 -
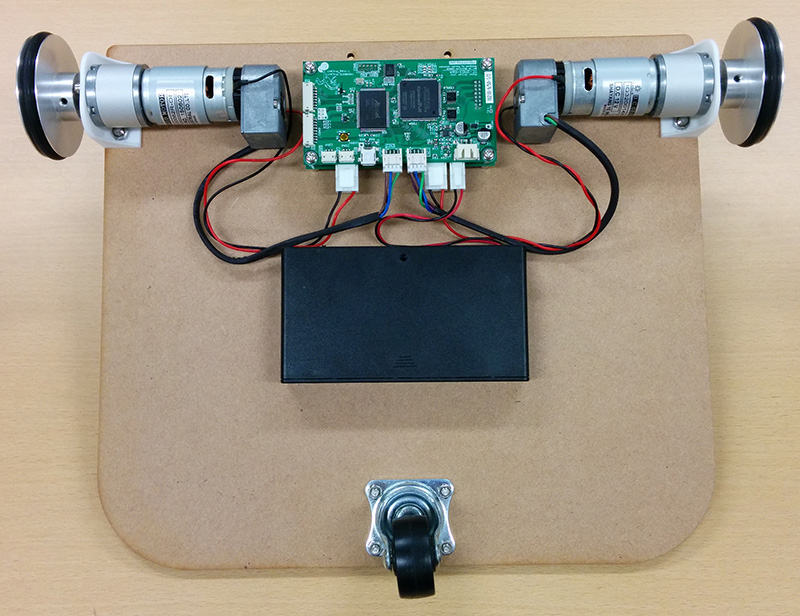
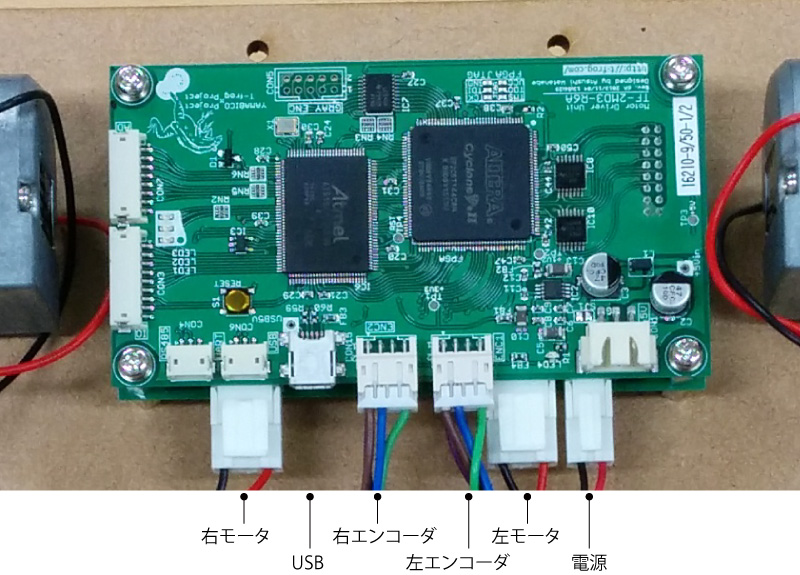
配線
モータ・電池ボックスのケーブルをモータドライバに接続
以上でロボットの組み立ては完了です。
昨年以前のロボットのメンテナンス
2014年、2015年、2016年のロボットを使用する場合、ネジ類が緩んでいないか確認しましょう。特に、ホイールをモータに固定しているイモネジの緩みに注意して下さい。
初期設定
-
ノートPCでUbuntuを起動
- USBデバイスを開けるように、使用しているユーザをdialoutグループに追加
1
$ sudo adduser [ YOUR_USER_NAME ] dialout
-
上記設定を反映するため、画面右上のアイコンから、ログアウトを選択してログアウト
- ログイン画面から再度ログイン
制御ソフトのインストールと動作テスト
- 画面左のランチャーから「端末」を起動し、下記コマンドを実行して制御ソフトをインストール(日本語環境の場合は
Downloadsをダウンロードに読み替えてください)1 2 3 4 5 6 7 8 9
$ cd ~/Downloads/ $ git clone https://github.com/openspur/yp-spur.git $ cd yp-spur $ mkdir build $ cd build $ cmake .. $ make $ sudo make install $ sudo ldconfig
ロボットパラメータファイルをダウンロードします。(参考資料: ロボットの見分け方)
- 2015年度・2016年度・2018年度のロボットの場合
1 2 3
$ mkdir ~/params $ cd ~/params/ $ wget https://at-wat.github.io/ROS-quick-start-up/files/rsj-seminar2016.param
- 2014年度のロボットの場合
1 2 3
$ mkdir ~/params $ cd ~/params/ $ wget https://at-wat.github.io/ROS-quick-start-up/files/rsj-seminar2014.param
- 2015年度・2016年度・2018年度のロボットの場合
-
ロボットの電池ボックスに電池を挿入
-
電池ボックスの側面にあるスライドスイッチをON
-
モータドライバのUSBをPCに接続
- 端末を開いて、下記コマンドで制御ソフトを起動
1 2
$ ypspur-coordinator -p ~/params/rsj-seminar20??.param【該当するものに置き換えること】\ -d /dev/serial/by-id/usb-T-frog_project_T-frog_Driver-if00
- ホイールを持ち上げて走り出さない状態、もしくは、ひっくり返してホイールが浮いている状態にしてサンプルプログラムを起動 (端末をもう1つ開いて実行します。)
1 2
$ cd ~/Downloads/yp-spur/build $ ./samples/run-test

ホイールが回転して、回転方向を何度か変え、最終的に止まることを確認したら、Ctrl+cで停止させます。このとき、ypspur-coordinatorは、まだ停止させないで下さい。(停止させた場合はもう一度起動) - 床の広い場所でサンプルプログラムを起動
1
$ ./samples/run-test1m x 0.1m の四角形を描いてロボットが移動することを確認します。最後に、サンプルプログラムと、ypspur-coordinatorを Ctrl+c で停止させます。
- 電池ボックスのスライドスイッチをOFF (待機電力で電池の電力を消費してしまいます)
補足
今回のセミナではYP-Spurをソースコードからインストールしましたが、 下記コマンドでバイナリーのみをインストールすることも可能です。
1
$ sudo apt-get install ros-kinetic-ypspur