点群処理とロボットナビゲーションの統合
Updated on: 2018-05-15
- 点群処理とロボットナビゲーションの統合
- rsj_robot_test.cpp の編集
- クラスタリング結果の受信
- ビルド&実行
- rsj_pointcloud_test_node と rsj_robot_test_node の起動
- センサに最も近いクラスタの位置情報を取得する
- ビルド&実行
点群処理とロボットナビゲーションの統合
PCL のクラスタリング結果をrsj_robot_test_nodeで利用してみましょう。
rsj_robot_test.cpp の編集
テキストエディタでrsj_robot_test.cppを開いてください。
1
2
$ cd ~/catkin_ws/src/rsj_robot_test/src
任意のテキストエディタで rsj_robot_test.cpp を開く
先頭にvisualization_msgs::MarkerArrayを扱うためのinclude文を加えます。
1
2
#include <tf/transform_datatypes.h>
#include <visualization_msgs/MarkerArray.h> // 追記
CMakeLists.txtを編集します。
1
2
$ cd ~/catkin_ws/src/rsj_robot_test
任意のテキストエディタで CMakeLists.txt を開く
find_packageとcatkin_packageの最後にvisualization_msgsを追記します。
1
2
3
4
5
6
7
8
9
10
11
12
13
find_package(catkin REQUIRED COMPONENTS
(略)
tf
visualization_msgs # 追記
)
find_package(Boost 1.53 REQUIRED system serialization)
## Declare a catkin package
catkin_package(DEPENDS
(略)
tf
visualization_msgs # 追記
)
また、package.xml の<build_depend> <run_depend> にもvisualization_msgsを追記します。
1
2
3
4
5
6
7
(略)
<build_depend>tf</build_depend>
<build_depend>visualization_msgs</build_depend> <!--追記-->
(略)
<run_depend>tf</run_depend>
<run_depend>visualization_msgs</run_depend> <!--追記-->
一旦ビルドし、コンパイルエラーがないことを確認してください。
1
2
$ cd ~/catkin_ws
$ catkin_make
クラスタリング結果の受信
RsjRobotTestNodeクラスで、sub_odom_やsub_scan_を定義しているところに、visualization_msgs::MarkerArray用のサブスクライバを追加します。
1
2
ros::Subscriber sub_scan_;
ros::Subscriber sub_clusters_; // 追記
RsjRobotTestNodeのコンストラクタに、visualization_msgs::MarkerArray用のサブスクライバ初期化コードを追加します。
1
2
3
4
5
6
7
RsjRobotTestNode()
{
(略)
sub_scan_ = nh_.subscribe(
"scan", 5, &RsjRobotTestNode::cbScan, this);
sub_clusters_ = nh_.subscribe(
"clusters", 5, &RsjRobotTestNode::cbCluster, this); // 追記
更に、RsjRobotTestNodeクラスに、visualization_msgs::MarkerArray用のコールバック関数を追加します。(cbScanの後の位置など)
1
2
3
4
void cbCluster(const visualization_msgs::MarkerArray::ConstPtr &msg)
{
ROS_INFO("clusters: %zu", msg->markers.size());
}
編集が終了したらエディタを閉じてください。
ビルド&実行
ターミナルで次のコマンドを実行してください。
1
2
$ cd ~/catkin_ws
$ catkin_make
お手持ちの 3D センサ、およびロボットの USB ケーブルをPCに接続しておきます。
また、ロボットが走り出さないように、電池ボックスのスイッチを OFF にしておいてください。
まずナビゲーションシステムを起動します。 地図を作成した際の初期位置・姿勢と同じようにロボットを置いて、下記のコマンドを実行します。
Xtion PRO Live の場合
1
2
3
4
$ cd ~/catkin_ws/
$ source devel/setup.bash
$ roslaunch rsj_seminar_navigation xtion_integration.launch \
robot_param:=/home/【ユーザ名】/params/rsj-seminar20??.param 【該当するものに置き換えること】
YVT-35LX の場合
1
2
3
4
$ cd ~/catkin_ws/
$ source devel/setup.bash
$ roslaunch rsj_seminar_navigation 3durg_integration.launch \
robot_param:=/home/【ユーザ名】/params/rsj-seminar20??.param 【該当するものに置き換えること】
rsj_pointcloud_test_node と rsj_robot_test_node の起動
3次元センサをお持ちの場合は新しいターミナルを開きrsj_pointcloud_test_nodeを起動します。
Xtion PRO Live の場合
1
2
3
4
5
6
7
8
$ cd ~/catkin_ws/
$ source devel/setup.bash
$ rosrun rsj_pointcloud_test rsj_pointcloud_test_node \
_target_frame:=camera_link _topic_name:=/camera/depth_registered/points
[ INFO] [1524040063.315596383]: target_frame='camera_link'
[ INFO] [1524040063.315656650]: topic_name='/camera/depth_registered/points'
[ INFO] [1524040063.320448185]: Hello Point Cloud!
[ INFO] [1524040064.148595331]: points (src: 307200, paththrough: 34350)
YVT-35LX の場合
1
2
3
4
5
$ cd ~/catkin_ws/
$ source devel/setup.bash
$ rosrun rsj_pointcloud_test rsj_pointcloud_test_node \
_target_frame:= _topic_name:=/hokuyo3d/hokuyo_cloud2
[ INFO] [1528008816.751100536]: points (src: 2674, paththrough: 1019)
さらに別のターミナルでrsj_robot_test_nodeを起動します。
1
2
3
4
5
6
7
8
$ cd ~/catkin_ws/
$ source devel/setup.bash
$ rosrun rsj_robot_test rsj_robot_test_node
[ INFO] [1523957582.691740639]: Hello ROS World!
[ INFO] [1523957582.991946984]: clusters: 6
[ INFO] [1523957583.091959056]: clusters: 7
[ INFO] [1523957583.191939063]: front-range: 3.178
[ INFO] [1523957583.192001041]: front-range: 3.178
rsj_robot_test_node側の端末で「[ INFO] [1523957583.091959056]: clusters: 7」のように PCL で処理したクラスタを受信し、その個数を表示できていることが分かります。
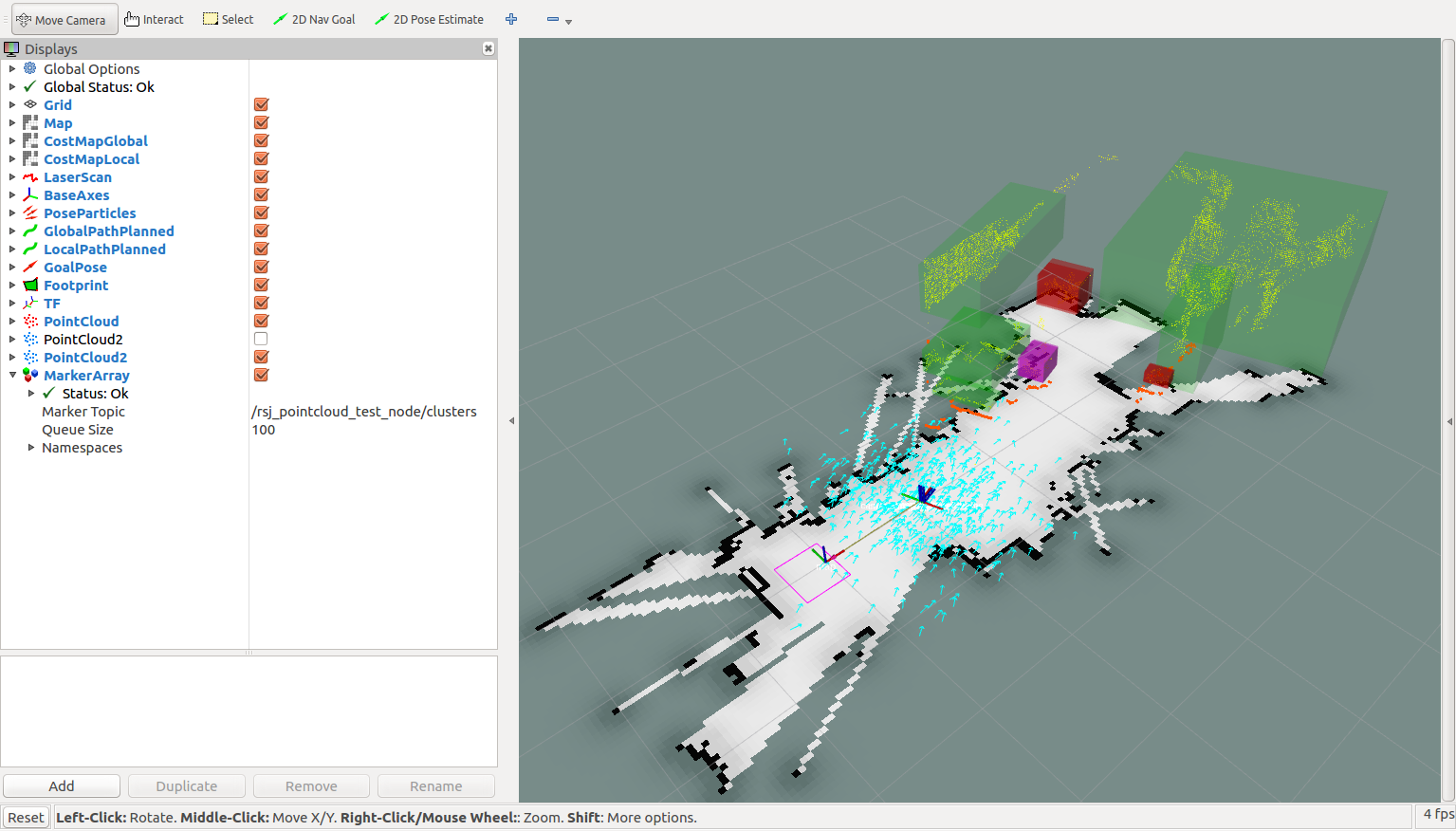
また RViz 上ではnavigation用のマップ上に重畳してPointCloudのクラスタと、クラスタを囲む直方体が表示されています。センサに最も近いクラスタは紫で表示されています。
センサに最も近いクラスタの位置情報を取得する
RViz 上で紫で表示されている、センサに最も近いクラスタの位置を取得しましょう。
テキストエディタでrsj_robot_test.cppを開いてください。
1
2
$ cd ~/catkin_ws/src/rsj_robot_test/src
任意のテキストエディタで rsj_robot_test.cpp を開く
cbCluster関数を編集します。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
void cbCluster(const visualization_msgs::MarkerArray::ConstPtr &msg)
{
const visualization_msgs::Marker *target = NULL;
for (visualization_msgs::MarkerArray::_markers_type::const_iterator
it = msg->markers.cbegin(),
it_end = msg->markers.cend();
it != it_end; ++it)
{
const visualization_msgs::Marker &marker = *it;
if (marker.ns == "target_cluster")
{
target = ▮
}
}
ROS_INFO("clusters: %zu", msg->markers.size());
if (target != NULL)
{
float dx = target->pose.position.x;
float dy = target->pose.position.y;
ROS_INFO("target: %f, %f", dx, dy);
}
}
編集が終了したらエディタを閉じてください。
ビルド&実行
前項と同じようにビルドして実行してください。
rsj_robot_test_node側の端末で「[ INFO] [1526342853.141823400]: target: 2.579500, 0.063012」のように PCL で処理した最も近いクラスタの座標がを表示できていることが分かります。なおここで表示されている座標はロボットの中心を原点とし、正面をX軸プラス方向とするローカル座標系です。
終了したら課題に進んでください。