ROSを用いた点群取得
Updated on: 2018-06-07
ROSを用いた点群取得
ここではURG-04LX-UG01の場合を例に、点群を取得してロボットの動作に反映する方法を習得します。
urg_nodeをインストール
1
2
$ sudo apt-get update
$ sudo apt-get install ros-kinetic-urg-node
rsj_robot_test_nodeでURGのデータ取得
ソースコードの変更
ソースコードの先頭部分で、スキャンデータのメッセージ型をincludeします。
1
2
3
(略)
#include <geometry_msgs/Twist.h>
#include <sensor_msgs/LaserScan.h> // <- スキャンデータのメッセージ型をinclude
RsjRobotTestNodeクラス内で、sub_odom_(サブスクライバ)を定義しているところに、
URG用のサブスクライバを追加します。
1
2
3
4
5
6
class RsjRobotTestNode
{
private:
(略)
ros::Subscriber sub_odom_;
ros::Subscriber sub_scan_; // <- URG用のサブスクライバを追加
RsjRobotTestNodeのコンストラクタに、
URG用のサブスクライバ初期化コードを追加します。
1
2
3
4
5
6
7
8
9
RsjRobotTestNode()
: nh_()
{
pub_twist_ = nh_.advertise<geometry_msgs::Twist>(
"cmd_vel", 5);
sub_odom_ = nh_.subscribe(
"odom", 5, &RsjRobotTestNode::cbOdom, this);
sub_scan_ = nh_.subscribe(
"scan", 5, &RsjRobotTestNode::cbScan, this); // <- URG用のサブスクライバ初期化コードを追加
更に、RsjRobotTestNodeクラスに、
URG用のコールバック関数を追加します。(cbOdomの後の位置など)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
void cbScan(const sensor_msgs::LaserScan::ConstPtr &msg)
{
int i = msg->ranges.size() / 2;
if (msg->ranges[i] < msg->range_min || // エラー値の場合
msg->ranges[i] > msg->range_max || // 測定範囲外の場合
std::isnan(msg->ranges[i])) // 無限遠の場合
{
ROS_INFO("front-range: measurement error");
}
else
{
ROS_INFO("front-range: %0.3f",
msg->ranges[msg->ranges.size() / 2]);
}
}
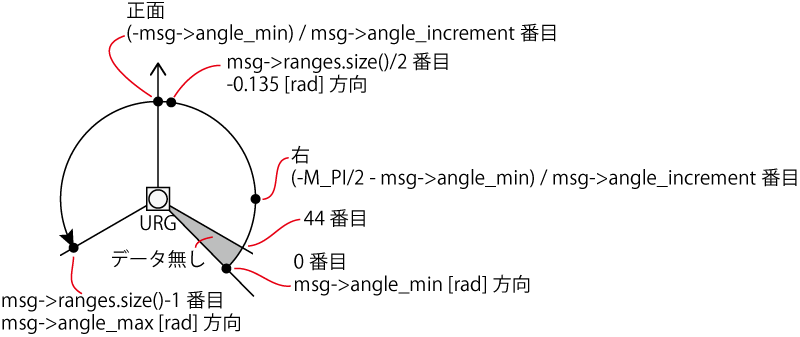
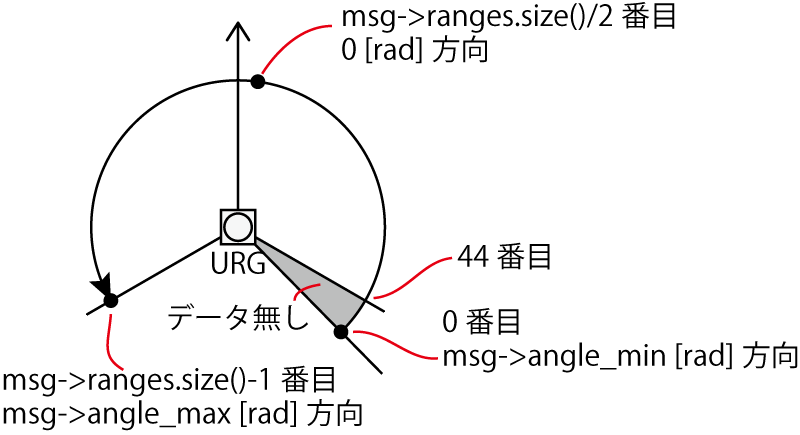
このコールバック関数中では、距離データ配列のうち、
配列の中央の距離を表示しています。
すなわち、URGの場合、正面方向の距離データ(m単位)が表示されます。
また、msg->rangesの値がmsg->range_minより小さい場合は、測定エラー(遠すぎて測定できない、など)を意味しています。
なお、msg->ranges[0]はmsg->angle_min方向(rad単位)、msg->ranges[msg->size()-1]はmsg->angle_max方向(rad単位)を表します。
ビルド&実行
まず、catkin_wsでcatkin_makeを実行して、追加したコードをビルドします。
roscore、ypspur_ros、urg_node、rsj_robot_test_nodeを実行したいので、端末を4つ用意して、下記それぞれを実行します。
URGとロボットのUSBケーブルを接続しておきます。 また、ロボットが走り出さないように、電池ボックスのスイッチをOFFにしておくとよいでしょう。
1つ目の端末でroscoreを起動
1
$ roscore
2つ目の端末でypspur_rosを起動
1
2
3
$ rosrun ypspur_ros ypspur_ros _param_file:=/home/【ユーザ名】/params/rsj-seminar20??.param \
_port:=/dev/serial/by-id/usb-T-frog_project_T-frog_Driver-if00 \
_compatible:=1
3つ目の端末でurg_nodeを起動
1
2
$ rosrun urg_node urg_node \
_serial_port:=/dev/serial/by-id/usb-Hokuyo_Data_Flex_for_USB_URG-Series_USB_Driver-if00
4つ目の端末で作成したプログラムを実行
1
2
3
4
5
6
$ rosrun rsj_robot_test rsj_robot_test_node
Hello ROS World!
vel: 0.0000
front-range: 1.234
vel: 0.0000
front-range: 1.234
URGの正面方向に手などをおいて、距離の値が変わるのを確認して下さい。
小課題
URGの真横方向の距離を表示してみましょう。