Xtion PRO Live からのデータ取得
Updated on: 2018-05-23
Xtion PRO Live からのデータ取得
Xtion PRO Live からデータを取得し、2次元点群に変換する方法を説明します。
Xtion PRO Live は深度(物体までの距離)および RGB カラー画像を取得できます。 USB バスパワーで駆動可能なデプスセンサで、非常に扱いやすいのですが現在は廃番となっており入手することはできません。
ROS で利用可能な類似のセンサとしてOrbbec Astraがあります。 また Xtion PRO Live の後継機としてXtion2がありますが、こちらはまだ ROS 対応はしていません(2018/5/23時点)。
準備
パッケージのインストール
Xtion PRO Live を利用するためのパッケージと3次元点群から2次元データに変換するためのパッケージをインストールします。 準備のページに同様の手順を書いていますので、すでにインストールされている方はこの手順は不要です。
1
2
3
$ sudo apt install ros-kinetic-openni2-camera
$ sudo apt install ros-kinetic-openni2-launch
$ sudo apt install ros-kinetic-pointcloud-to-laserscan
launchファイルの入手
点群を3次元から2次元データに変換するパッケージの launch ファイル等をダウンロード
1
2
$ cd ~/catkin_ws/src
$ git clone https://github.com/KMiyawaki/rsj_pointcloud_to_laserscan.git
動作確認
launchファイルの実行
PC の USB ポートに Xtion PRO Live を接続し、次のコマンドを実行します。
1
2
3
4
$ cd ~/catkin_ws/
$ catkin_make
$ source devel/setup.bash
$ roslaunch rsj_pointcloud_to_laserscan rsj_pointcloud_to_laserscan.launch
コンソールに赤字でエラーメッセージが出ていないかどうか確認してください。 もしエラーメッセージが出ていたら、プログラムを Ctrl+c で終了し、 Xtion PRO Live を USB ポートから一旦抜いて再接続してからもう一度上記を実行してみてください。
データの表示
別のコマンドターミナルを開き次を実行してください。
1
2
$ cd ~/catkin_ws/src/rsj_pointcloud_to_laserscan/config/rviz
$ rosrun rviz rviz -d view_scan.rviz
下図のように2次元の点群が表示されれば成功です。
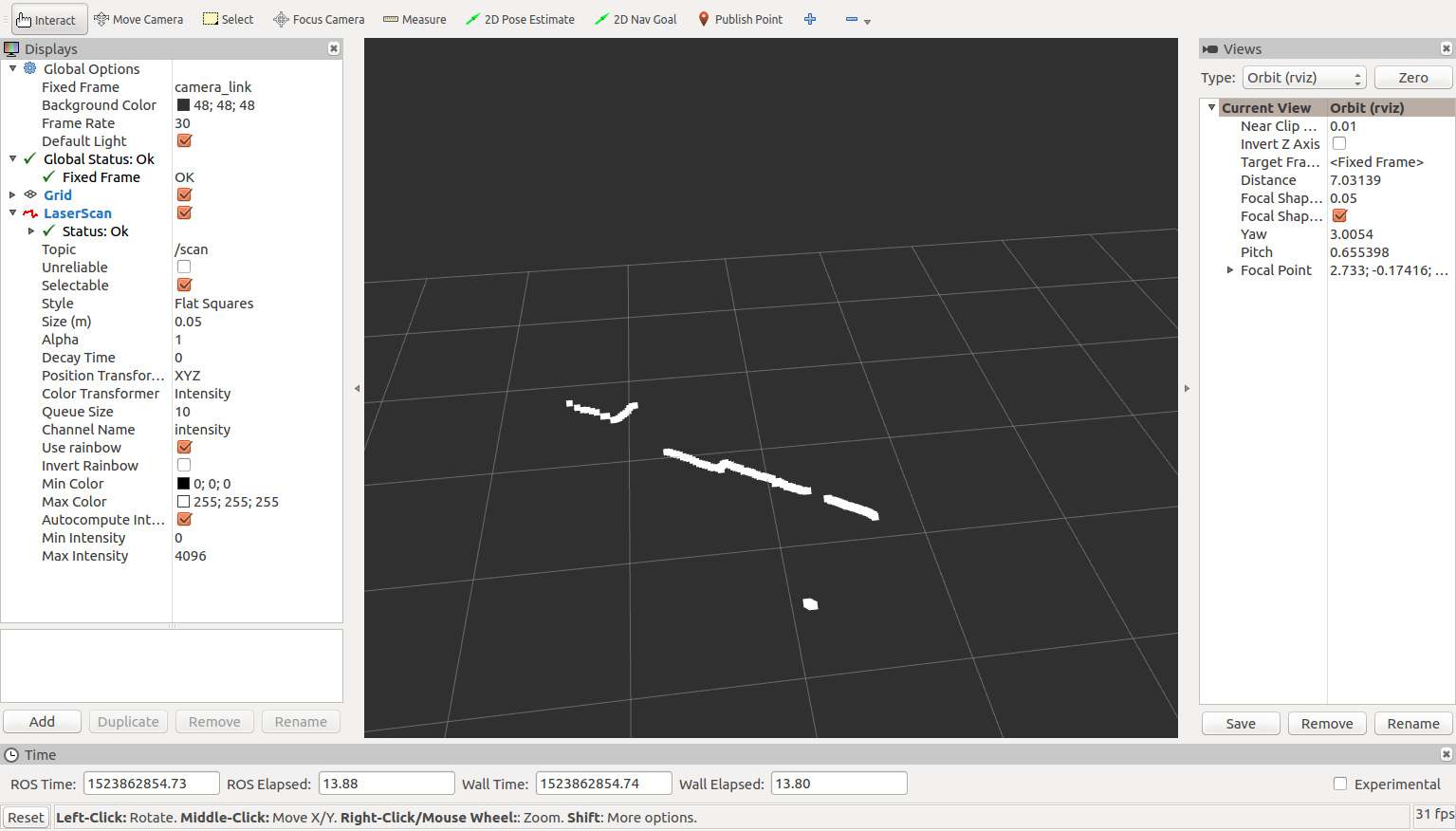
この2次元点群は3次元センサが出力している3次元点群からpointcloud_to_laserscanノードを使って、高さの範囲指定で切り出して生成しているものです。
3次元点群そのものの処理については後に続く実習で説明します。