ROSの便利機能
Updated on: 2018-06-15
ROSの便利機能
ROSには多くの便利な機能が用意されています。ここでは、そのうちのよく利用するコマンドなどの一部を紹介します。
roslaunch
ROSを用いた点群取得では、 端末を4つ起動して、それぞれroscoreとrosrunコマンドでノードを起動していました。 複雑なロボットシステムではこれが、100個以上のノードになる場合もあり、手作業ではやっていられません。
そこでROSには、launchファイルに、起動するノードやそのパラメータを書いておき、 roslaunchコマンドで一括起動する方法が用意されています。 下記の操作を行い、launchファイルを追加してみましょう。
- rsj_robot_testパッケージに、launchディレクトリを作成
1
$ mkdir ~/catkin_ws/src/rsj_robot_test/launch - robot_test.launchファイルを作成して開く
1
$ gedit ~/catkin_ws/src/rsj_robot_test/launch/robot_test.launch - 下記内容を記入
1 2 3 4 5 6 7 8 9 10 11 12 13 14
<launch> <node pkg="ypspur_ros" type="ypspur_ros" name="ypspur_ros"> <param name="port" value="/dev/serial/by-id/usb-T-frog_project_T-frog_Driver-if00" /> <param name="param_file" value="/home/$(env USER)/params/rsj-seminar20??.param該当するものに置き換えること" /> <param name="compatible" value="1" /> </node> <node pkg="urg_node" type="urg_node" name="urg_node"> <param name="serial_port" value="/dev/serial/by-id/usb-Hokuyo_Data_Flex_for_USB_URG-Series_USB_Driver-if00" /> </node> <node pkg="rsj_robot_test" type="rsj_robot_test_node" name="robot_test" output="screen"> </node> </launch>
作成したlaunchファイルは下記のコマンドで実行できます。
1
$ roslaunch rsj_robot_test robot_test.launch
これは、rsj_robot_testパッケージ中の、robot_test.launchを実行する、という指示を表しています。 下記に代表的なタグの説明を示します。
nodeタグ
動するノードを指定します。nodeタグの各属性の意味は下記の通りです。
name- ノードインスタンスの名
pkg- ノードを定義するパッケージ名
type- ノードの実行ファイル名(バイナリーやPythonスクリプト)
output- ノードの
stdoutの先:定義しないとstdout(ROS_INFOやstd::coutへの出力等)は端末で表示されず、~/.ros/log/に保存されるログファイルだけに出力される。端末で表示したい場合はscreenにします。
paramタグ
パラメータサーバーにパラメータを設定します。起動されるノードはこのパラメータが利用できます。
paramは<launch>、</launch>の間に入れるとグローバルパラメータに、<node>、</node>の間に入れるとプライベートパラメータになります。
グローバルとプライベートでは最終的に展開される名前が異なってきます。
例えば、同じbarというパラメータでも次のような違いがあります。
- グローバルパラメータの場合、 ROS のノードからは
/barという名前で参照される。 - ノード名
fooのプライベートパラメータの場合、ROS のノードからは/foo/barという名前で参照される。
各属性は下記の通りです。
name- パラメータ名
value- パラメータの値
type- double, int, string, bool など (一意に決まるときは省略可能)
remapタグ
ノードとトピックをつなぎ変えます。
remapタグの各属性の意味は下記の通りです。
from- 変更前のトピック名
to- 変更後のトピック名
これを使うことで、ノードとトピックをつなぎ変えることができます。たとえば、下記のような、動作計画のノードと、ロボットのドライバノードがつながっている状態から、 新たに衝突回避のノードを加えたいとします。
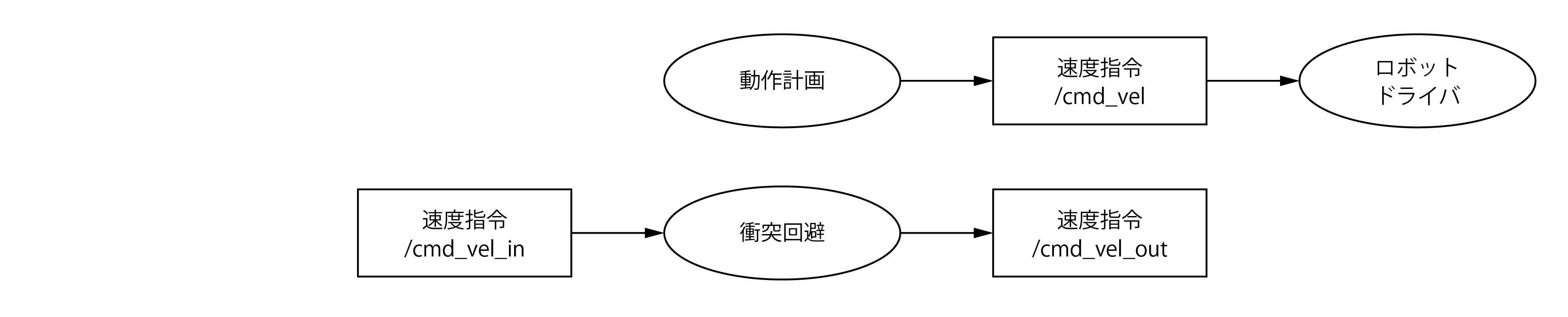
remapを用いることで、各ノードのソースコードを変更することなく、ノードとトピックの接続だけ切り替えて、動作計画とロボットドライバの間に、衝突回避を追加することができます。

rqt_graph
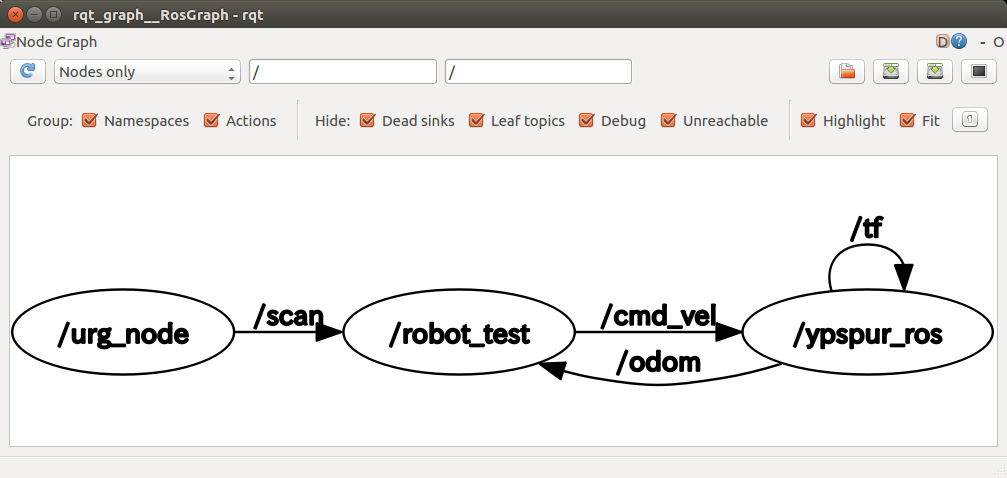
トピックとノードの接続状態を可視化することができます。 ロボットとURGをPCに接続して、roslaunchの項で説明したようにrobot_test.launchを実行し、その状態で下記コマンドを実行してみましょう。
1
$ rqt_graph
以下の画像のように、ノードとトピックの接続グラフが表示されます。
rostopic
デバッグなどのため、ROSのトピックに流れているメッセージを確認したいときや、 試しにメッセージを送信したいときに、コマンドラインのツールでこれらの処理を行うことができます。
- 存在するトピックを確認する
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
$ rostopic list
/ad/ad0
/ad/ad1
/ad/ad2
/ad/ad3
/ad/ad4
/ad/ad5
/ad/ad6
/ad/ad7
/cmd_vel
/control_mode
/diagnostics
/laser_status
/odom
/rosout
/rosout_agg
/scan
/tf
/tf_static
/urg_node/parameter_descriptions
/urg_node/parameter_updates
/wrench
- 1つのトピックに流れているメッセージを確認する
1
$ rostopic echo /odom
- 1つのトピックにメッセージを送信する
Tab でトピック名、データ型及びメッセージのテンプレートが出せます。
1
2
3
4
5
6
7
8
$ rostopic pub -1 /cmd_vel geometry_msgs/Twist [Tab補完で表示]"linear
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
-1を利用すると一回のみ送信します。
-1を削除するとrostopicはこのメッセージを1度送信し、 Ctrl+c を入力するまで待機して、あとから起動したノードがメッセージを受け取れる状態を維持します。
rosbag
ROSで提供されているrosbagツールを用いると、ROS上で送信、受信されているデータ(メッセージ)を記録・再生することができます。
- データを記録 (URGのデータ /scan と、オドメトリ /odom を記録する例)
1
$ rosbag record /scan /odom
記録の終了は、Ctrl+c で行います。記録されたデータは、「日付時刻.bag」のファイル名で保存されています。
- データを再生する
1
$ rosbag play ファイル名.bag
RViz
ROSでは、rvizという、データ可視化ツール(ビューワ)が提供されています。 今回のセミナーの環境にも、インストールされており、URGのデータやオドメトリを表示することができます。 ロボットとURGをPCに接続して、roslaunchの項で説明したようにrobot_test.launchを実行し、その状態で下記コマンドを実行してみましょう。
1
$ rosrun rviz rviz
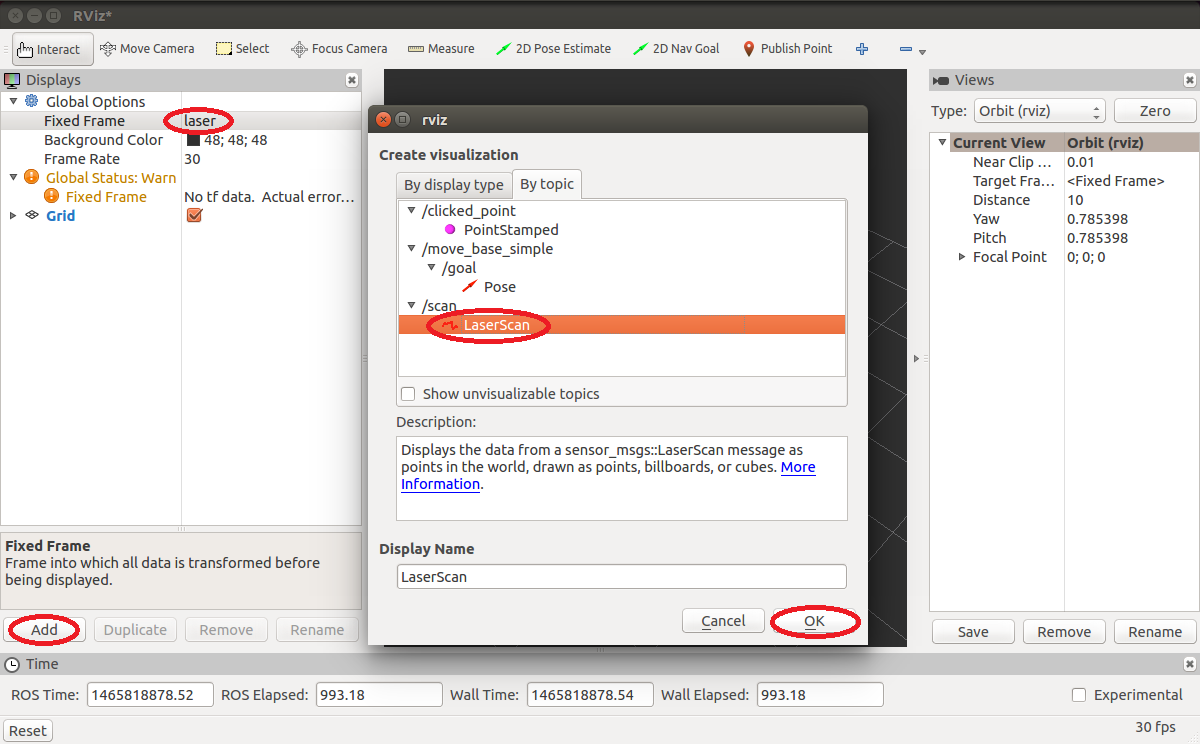
rviz画面中の、「add」ボタンをクリックし、開いた選択ウインドウ内で、
「By topic」タブから、「/scan」中の「LaserScan」を選択します。
また、「Global Option」の「Fixed Frame」欄に「laser」と入力します。
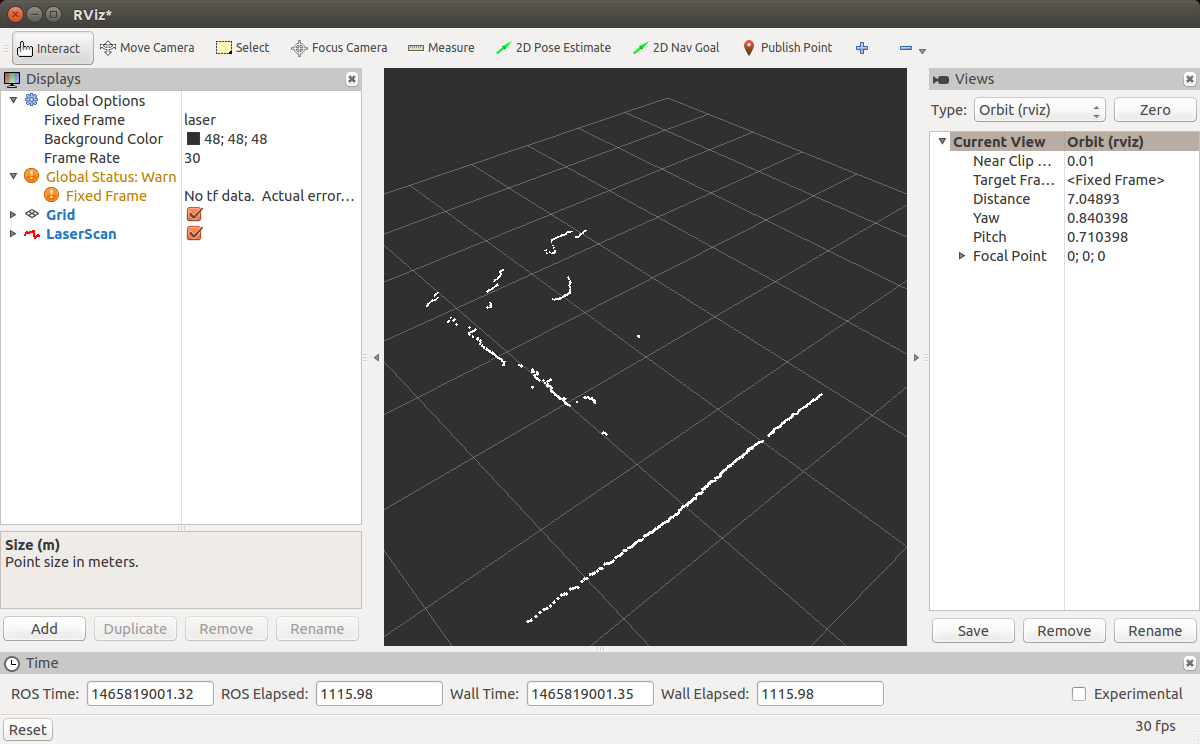
センサデータが取得できていれば、図のように、距離データがプロットされます。
3Dセンサからのデータ取得に関する実習
配布された3次元距離センサのデータについて、roslounchを利用して2次元データに変換し、RVizで結果を確認してみましょう。
お手持ちのセンサに応じて、以下を実施してください。